DISAL offers a range of student projects its three main areas of expertise: Distributed Robotic Systems, Sensor and Actuator Networks, and Intelligent Vehicles. For more information about supervision guidelines and different types of student projects please refer to this page.
Spring Semester 2023-2024
MAV Relative Localization Using a Particle Filter and a Euclidean Signed Distance Field
Assigned to: Cameron Carl Haas
 |
 |
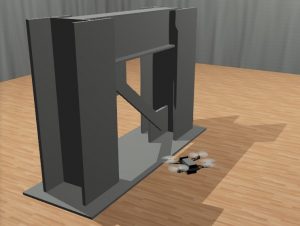
Community-critical steel infrastructure, such as energy transmission and telecommunication lines, steel bridges, offshore rigs, and so on, requires regular inspection to guarantee the integrity of the structure and sound operation. Current inspection approaches usually require the use of heavy equipment, as well as visual inspection performed by technicians, which exposes them to potentially dangerous situations. Furthermore, inspections usually imply downtime for the structure under inspection, which is costly and inefficient. The main interest is, therefore, to identify fatigue signs within a structure without requiring it to stop its usage. Micro Aerial Vehicles (MAVs) endowed with visual and depth-sensing capabilities are good candidates for this goal.
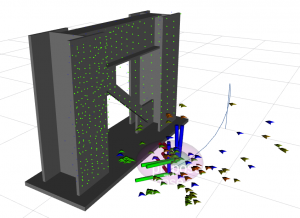
The goal of this project is to implement the localization of an MAV relative to a structure with a known geometry (e.g., represented as an STL mesh) using Monte Carlo localization [1,2], i.e., a particle filter. The current implementation consists of using the Webots simulator [3] as a sensor model and comparing point clouds generated by the MAV with the ones of the filter’s particles to evaluate their likelihood. This method depends on the Webots simulator and cannot be efficiently ported to a real MAV. Other solutions must be implemented, such as building an Euclidean Signed Distance Field (ESDF) [4] around the mesh and using it to evaluate the point clouds [1,2]. As such a map can be expensive to build and store, other approaches may be explored, such as direct distance computation of the points to the mesh, and their tradeoffs and performance should be analyzed. If time permits, experiments on an actual MAV will be carried out to validate the implemented solution.
Recommended type of project: semester project / master project
Work breakdown: 50% theory, 50% simulation
Prerequisites: Broad interest in robotics, excellent programming skills (C/C++, Python). Knowledge in ROS, Webots, git.
Keywords: MAV, Monte Carlo localization, particle filter, point cloud, Webots, simulation
Contact: Lucas Wälti
References:
[1] Perez-Grau, Francisco J, Fernando Caballero, Antidio Viguria, and Anibal Ollero. “Multi-Sensor Three-Dimensional Monte Carlo Localization for Long-Term Aerial Robot Navigation.” International Journal of Advanced Robotic Systems 14, no. 5 (September 1, 2017): 172988141773275. https://doi.org/10.1177/1729881417732757.
[2] Perez-Grau, Francisco J., Ricardo Ragel, Fernando Caballero, Antidio Viguria, and Anibal Ollero. “An Architecture for Robust UAV Navigation in GPS-Denied Areas.” Journal of Field Robotics 35, no. 1 (2018): 121–45. https://doi.org/10.1002/rob.21757.
[3] “Webots: Robot Simulator.” Accessed October 6, 2022. https://cyberbotics.com/.
[4] Oleynikova, Helen, Alexander Millane, Zachary Taylor, Enric Galceran, Juan Nieto, and Roland Siegwart. “Signed Distance Fields: A Natural Representation for Both Mapping and Planning.” Application/pdf, 2016, 6 p. https://doi.org/10.3929/ETHZ-A-010820134.
Geometric reconstruction of a steel structure from onboard sensor data
Assigned to: Robin Junod

Community-critical steel infrastructure, such as energy transmission and telecommunication lines, steel bridges, offshore rigs, and so on, requires regular inspection to guarantee the integrity of the structure and sound operation. Current inspection approaches usually require the use of heavy equipment, as well as visual inspection performed by technicians, which exposes them to potentially dangerous situations. Furthermore, inspections usually imply downtime for the structure under inspection, which is costly and inefficient. The main interest is, therefore, to identify fatigue signs within a structure without requiring it to stop its usage. Micro Aerial Vehicles (MAVs) endowed with visual and depth-sensing capabilities are good candidates for this goal.
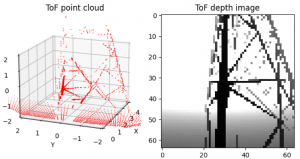
Two previous semester projects tackled the segmentation of 3D point clouds obtained from observing steel structures with an MAV equipped with a depth camera. The current implementation status is based on the Hough transform [1] and allows the identification of segments in a structure with fairly regular characteristics (e.g., beams with circular cross-sections, homogeneous geometries, etc…) and the identification of their connections. However, actual structures present more varied characteristics (differences in shape, width, and length, e.g., I-shaped cross-section) that challenge the current approach. This project will explore potential improvements to the currently implemented solution and possibly investigate additional techniques (e.g., deep learning-based). Another front that could be explored is to perform bundle adjustments on the whole collected data to ensure more consistent reconstruction (e.g., using pose graph optimization techniques, such as those implemented in GTSAM [2]). This would allow the mitigation of noisy measurements and pose estimate drifts that will corrupt the identification of the structure.
Recommended type of project: semester project / master project
Work breakdown: 70% theory, 30% simulation
Prerequisites: Broad interest in robotics, very good programming skills (C/C++, Python). Knowledge in ROS, Webots, git. Having attended a computer vision class is recommended.
Keywords: Webots, simulation, MAV, point cloud, 3D, segmentation, mapping, SLAM.
Contact: Lucas Wälti
References:
[1] Dalitz, Christoph, Tilman Schramke, and Manuel Jeltsch. “Iterative Hough Transform for Line Detection in 3D Point Clouds.” Image Processing on Line 7 (July 19, 2017): 184–96. https://doi.org/10.5201/ipol.2017.208.
[2] Dellaert, Frank. “Factor Graphs and GTSAM: A Hands-on Introduction.” Georgia Institute of Technology, Tech. Rep 2 (2012): 4. https://gtsam.org/, https://github.com/borglab/gtsam
[3] “Webots: Robot Simulator.” Accessed October 6, 2022. https://cyberbotics.com/.
Integration of Local Wind Measurement for Robotic Gas Sensing Task
Assigned to: Diana Celestina Bejan
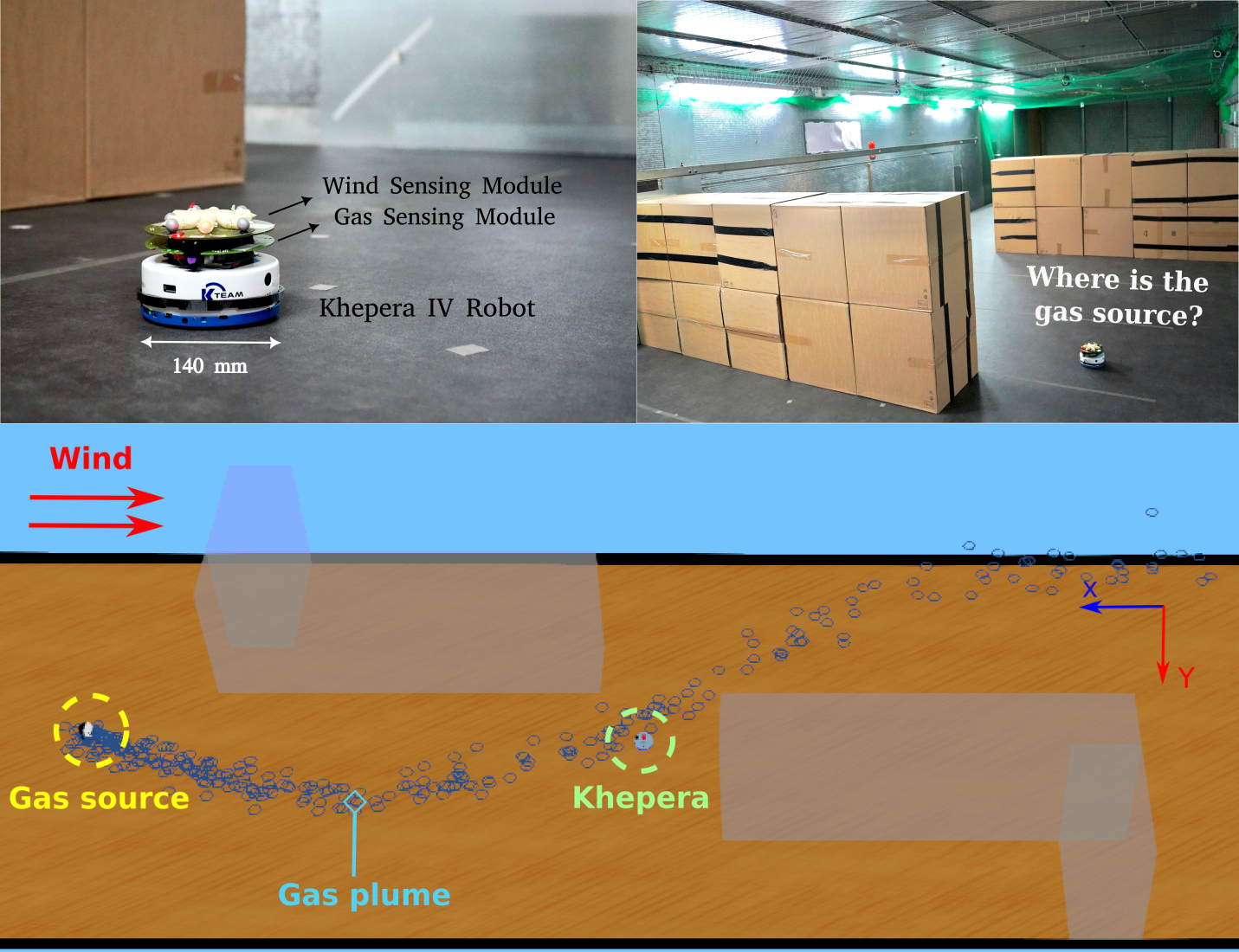
The deployment of robots for Gas Source Localization (GSL) tasks in hazardous scenarios significantly reduces the risk to humans and animals, given their autonomy and sensing capability (gas and wind). GSL is a challenging task in the real world due to the stochastic nature of the gas dispersion phenomenon, primarily influenced by the advection caused by airflow, which directs the movement of molecules. The environmental structure and obstacles shape the airflow, and therefore impact the gas dispersion process. Estimating the overall wind flow is often unfeasible and demands extensive prior knowledge about the environment. In such cases, local wind measurements (wind speed and wind direction) offer valuable information about the gas trace, substantially enhancing GSL task efficiency.
This project aims to explore the integration of local wind measurements with a state-of-the art probabilistic GSL framework, namely Source Term Estimation [1]. The student will start by investigating various solutions and evaluating their performance in a high-fidelity robotics simulator, Webots [3]. If the results are promising and if time allows, physical experiments with a real Khepera robot, equipped with gas and wind sensing modules, will be conducted in a wind tunnel.
Recommended type of project: semester project, master project
Work breakdown: 40% theory, 60% simulation
Prerequisites: passion on solving issues, broad interest in robotics, good programming skill (C/C++), experience with Webots and real robot experiments will be an asset
Keywords: gas source localization, wind information, probablistic inference
Contact: Wanting Jin
References:
[1] W. Jin, F. Rahbar, C. Ercolani, and A. Martinoli, “Towards Efficient Gas Leak Detection in Built Environments: Data-Driven Plume Modeling for Gas Sensing Robots,” in 2023 IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, May 2023, pp. 7749–7755.
[2] P. Ojeda, J. Monroy, and J. Gonzalez-Jimenez, “Information-Driven Gas Source Localization Exploiting Gas and Wind Local Measurements for Autonomous Mobile Robots,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1320–1326, Apr. 2021.
[3] Li, J.G., Meng, Q.H., Wang, Y. and Zeng, M., 2011. Odor source localization using a mobile robot in outdoor airflow environments with a particle filter algorithm. Autonomous Robots, 30, pp.281-292.
Incorporation of Physics Informed Neural Networks (PINNs) for Gas Source Localization Task
Assigned to: Théodore Maradan
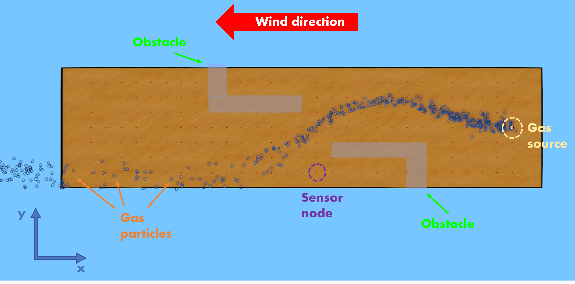 |
In case of gas leaks, to estimate the source position with the gas concentration measured at different locations in the environment becomes an ill-posed inverse estimation problem. This complexity arises from the stochastic nature of the gas dispersion phenomenon. The gas dispersion process is mainly governed by the wind flow, influenced by the environment inlet and outlet condition, as well as obstacle configuration. Given the impracticality of extensively exploring and monitoring the entire environment in terms of time and resources, integrating physical knowledge about the gas dispersion process and the environmental information is crucial to ensure the success and efficiency of the localizing source position from scattered measurements [1].
The Physics Informed Neural Network (PINNs) [2] can incorporate the knowledge of general physical laws, described by partial differential equations, that govern a given dataset in the learning process. Consequently, PINNs hold significant potential in addressing gas source localization (GSL) problems. In this project, the integration of PINNs for GSL tasks will be explored, utilizing a simulated sensor network in a high-fidelity robotics simulator, Webots [3].
Recommended type of project: semester project, master project
Work breakdown: 40% theory, 60% programming
Prerequisites: passion on solving issues, broad interest in robotics and deep learning, good programming skill (C/C++), experience with PINNs and fluid dynamics will be an asset
Keywords: gas source localization, neural networks, sensor networks
Contact: Wanting Jin
References:
[1] W. Jin, F. Rahbar, C. Ercolani, and A. Martinoli, “Towards Efficient Gas Leak Detection in Built Environments: Data-Driven Plume Modeling for Gas Sensing Robots,” in 2023 IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, May 2023, pp. 7749–7755.
[2] Raissi, M., Perdikaris, P. and Karniadakis, G.E., 2019. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. Journal of Computational physics, 378, pp.686-707.
[3] Webots: https://cyberbotics.com/doc/reference/index
Fall Semester 2024-2025
The student projects for the next spring semester will be posted at the beginning of April 2024.